Tecnologia Científica
Um modelo neural para inteligência semelhante à humana em robôs flexíveis
Um sistema de controle de IA desenvolvido em conjunto por pesquisadores da SMART permite que braços robóticos flexíveis aprendam um amplo conjunto de movimentos uma única vez...
Por
Aliança Singapura-MIT para Pesquisa e Tecnologia - 20/02/2026


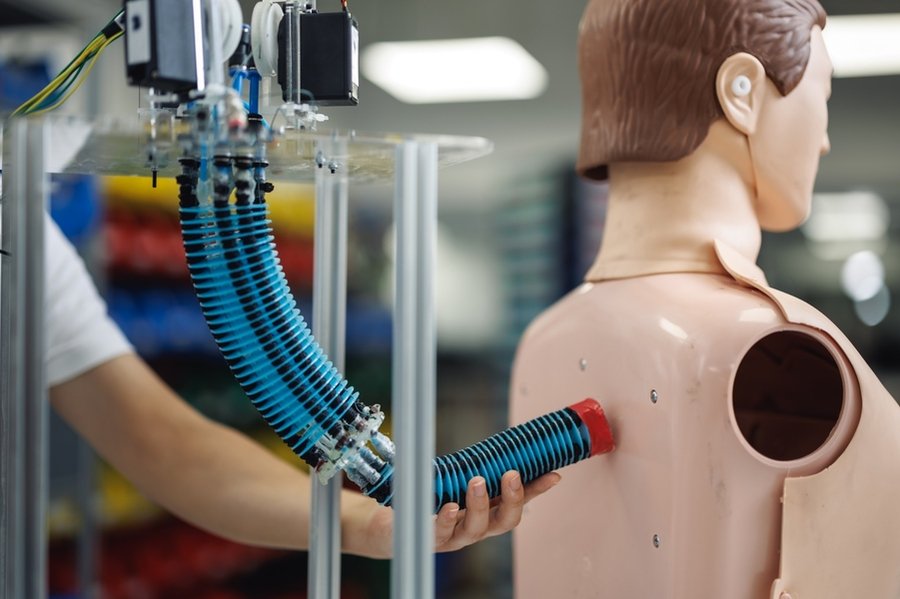
Um novo braço robótico flexível pode operar com segurança próximo ao corpo humano sem causar desconforto ou lesões. O sistema de controle por IA é ideal para situações de assistência, como o banho, onde o braço pode ajudar a limpar as costas — auxiliando pessoas com mobilidade reduzida e aliviando o trabalho dos cuidadores. Foto cedida pela Universidade Nacional de Singapura.
Um sistema de controle de IA desenvolvido em conjunto por pesquisadores da SMART permite que braços robóticos flexíveis aprendam um amplo conjunto de movimentos uma única vez e se adaptem instantaneamente a condições variáveis sem necessidade de novo treinamento.
Um novo sistema de controle de inteligência artificial permite que braços robóticos flexíveis aprendam um amplo repertório de movimentos e tarefas uma única vez e, em seguida, se adaptem a novos cenários instantaneamente, sem necessidade de novo treinamento ou perda de funcionalidade.
Essa inovação aproxima a robótica flexível da adaptabilidade humana para aplicações no mundo real, como em robótica assistiva, robôs de reabilitação e robôs flexíveis vestíveis ou médicos, tornando-os mais inteligentes, versáteis e seguros.
O trabalho foi liderado pelo grupo de pesquisa interdisciplinar Mens, Manus and Machina (M3S) — um trocadilho com o lema latino do MIT, “mens et manus”, ou “mente e mão”, com a adição de “machina”, que significa “máquina” — dentro da Aliança Singapura-MIT para Pesquisa e Tecnologia . A liderança do projeto é feita em conjunto por pesquisadores da Universidade Nacional de Singapura (NUS), juntamente com colaboradores do MIT e da Universidade Tecnológica de Nanyang, em Singapura (NTU Singapura).
Ao contrário dos robôs convencionais que se movem usando motores e juntas rígidas, os robôs flexíveis são feitos de materiais flexíveis, como borracha macia, e se movem usando atuadores especiais — componentes que agem como músculos artificiais para produzir movimento físico. Embora sua flexibilidade os torne ideais para tarefas delicadas ou adaptáveis, controlar robôs flexíveis sempre foi um desafio, pois sua forma muda de maneiras imprevisíveis. Os ambientes do mundo real são frequentemente complexos e repletos de perturbações inesperadas, e até mesmo pequenas mudanças nas condições — como uma alteração de peso, uma rajada de vento ou uma pequena falha de hardware — podem afetar seus movimentos.
Apesar dos avanços substanciais na robótica flexível, as abordagens existentes geralmente só conseguem atingir uma ou duas das três capacidades necessárias para que robôs flexíveis operem de forma inteligente em ambientes reais: usar o que aprenderam em uma tarefa para executar outra, adaptar-se rapidamente quando a situação muda e garantir que o robô permaneça estável e seguro enquanto adapta seus movimentos. Essa falta de adaptabilidade e confiabilidade tem sido uma grande barreira para a implantação de robôs flexíveis em aplicações práticas até o momento.
Em um estudo de acesso aberto intitulado “ Um controlador robótico flexível geral inspirado em sinapses neuronais estruturais e plásticas que se adapta a diversos braços, tarefas e perturbações ”, publicado em 6 de janeiro na Science Advances , os pesquisadores descrevem como desenvolveram um novo sistema de controle de IA que permite que robôs flexíveis se adaptem a diversas tarefas e perturbações. O estudo se inspira na maneira como o cérebro humano aprende e se adapta, e foi baseado em extensa pesquisa em controle robótico baseado em aprendizado, inteligência incorporada, robótica flexível e meta-aprendizado.
O sistema utiliza dois conjuntos complementares de “sinapses” — conexões que ajustam a forma como o robô se move — trabalhando em conjunto. O primeiro conjunto, conhecido como “sinapses estruturais”, é treinado offline em uma variedade de movimentos fundamentais, como dobrar ou estender um braço flexível suavemente. Esses movimentos formam as habilidades inatas do robô e fornecem uma base sólida e estável. O segundo conjunto, chamado de “sinapses plásticas”, é atualizado continuamente online enquanto o robô opera, refinando o comportamento do braço para responder ao que está acontecendo no momento. Uma medida de estabilidade integrada atua como uma salvaguarda, de modo que, mesmo enquanto o robô se ajusta durante a adaptação online, seu comportamento permanece suave e controlado.
“Robôs flexíveis têm um imenso potencial para assumir tarefas que máquinas convencionais simplesmente não conseguem, mas a verdadeira adoção requer sistemas de controle que sejam altamente capazes e confiáveis em termos de segurança. Ao combinar aprendizado estrutural com adaptabilidade em tempo real, criamos um sistema capaz de lidar com a complexidade de materiais flexíveis em ambientes imprevisíveis”, afirma a professora do MIT Daniela Rus, coinvestigadora principal do M3S, diretora do Laboratório de Ciência da Computação e Inteligência Artificial do MIT (CSAIL) e coautora correspondente do artigo. “É um passo a mais rumo a um futuro onde robôs flexíveis versáteis possam operar com segurança e inteligência ao lado de pessoas — em clínicas, fábricas ou no dia a dia.”
“Este novo sistema de controle de IA é um dos primeiros controladores gerais para robôs flexíveis que consegue atingir os três aspectos essenciais para que esses robôs sejam utilizados na sociedade e em diversas indústrias. Ele pode aplicar o que aprendeu offline em diferentes tarefas, adaptar-se instantaneamente a novas condições e manter-se estável durante todo o processo — tudo isso dentro de uma única estrutura de controle”, afirma o Professor Associado Zhiqiang Tang, primeiro autor e coautor correspondente do artigo, que era pós-doutorando no M3S e na NUS quando realizou a pesquisa e agora é professor associado na Universidade do Sudeste da China (SEU China).
O sistema suporta múltiplos tipos de tarefas, permitindo que braços robóticos flexíveis executem rastreamento de trajetória, posicionamento de objetos e regulação da forma de todo o corpo em uma abordagem unificada. O método também se generaliza para diferentes plataformas de braços flexíveis, demonstrando aplicabilidade multiplataforma.
O sistema foi testado e validado em duas plataformas físicas — um braço flexível acionado por cabo e um braço flexível acionado por liga com memória de forma — e apresentou resultados impressionantes. Obteve uma redução de 44 a 55% no erro de rastreamento sob fortes perturbações; mais de 92% de precisão de forma sob mudanças de carga, perturbações no fluxo de ar e falhas nos atuadores; e desempenho estável mesmo quando até metade dos atuadores falharam.
“Este trabalho redefine o que é possível em robótica flexível. Mudamos o paradigma do ajuste e das capacidades específicas para tarefas em direção a uma estrutura verdadeiramente generalizável com inteligência semelhante à humana. É um avanço que abre as portas para máquinas flexíveis inteligentes e escaláveis, capazes de operar em ambientes do mundo real”, afirma a Professora Cecilia Laschi, coautora correspondente e investigadora principal do M3S, Professora Cátedra da Reitoria no Departamento de Engenharia Mecânica da NUS, na Faculdade de Design e Engenharia, e diretora do Centro de Robótica Avançada da NUS.
Essa inovação abre portas para sistemas robóticos flexíveis mais robustos, permitindo o desenvolvimento de robótica para manufatura, logística, inspeção e medicina, sem a necessidade de reprogramação constante — reduzindo o tempo de inatividade e os custos. Na área da saúde, dispositivos de assistência e reabilitação podem adaptar automaticamente seus movimentos à força ou postura variável do paciente, enquanto robôs flexíveis vestíveis ou médicos podem responder com maior sensibilidade às necessidades individuais, melhorando a segurança e os resultados para o paciente.
Os pesquisadores planejam estender essa tecnologia a sistemas ou componentes robóticos que possam operar em velocidades mais altas e ambientes mais complexos, com aplicações potenciais em robótica assistiva, dispositivos médicos e manipuladores flexíveis industriais, bem como integração em sistemas autônomos do mundo real.
A pesquisa realizada no SMART foi apoiada pela Fundação Nacional de Pesquisa de Singapura, no âmbito do seu programa Campus para Excelência em Pesquisa e Empreendimento Tecnológico.