Tecnologia Científica
Um micro-roba´ flexavel que pode sobreviver a praticamente qualquer deformação
Esse roba´, apresentado em um artigo publicado na Nature Electronics , baseia-se em uma idanãia introduzida pela mesma equipe de pesquisadores háquase uma década.
Por
Ingrid Fadelli, - 07/04/2020

Uma equipe de pesquisa internacional liderada pelo Dr. Oliver Schmidt, trabalhando na Universidade de Tecnologia de Chemnitz (TU Chemnitz) e Leibniz IFW Dresden, desenvolveu recentemente um sistema microrobatico com uma ampla gama de aplicações possaveis, desde a realização de micro-cirurgias atéa entrega de mercadorias a seres humanos. . Esse roba´, apresentado em um artigo publicado na Nature Electronics , baseia-se em uma ideia introduzida pela mesma equipe de pesquisadores háquase uma década.

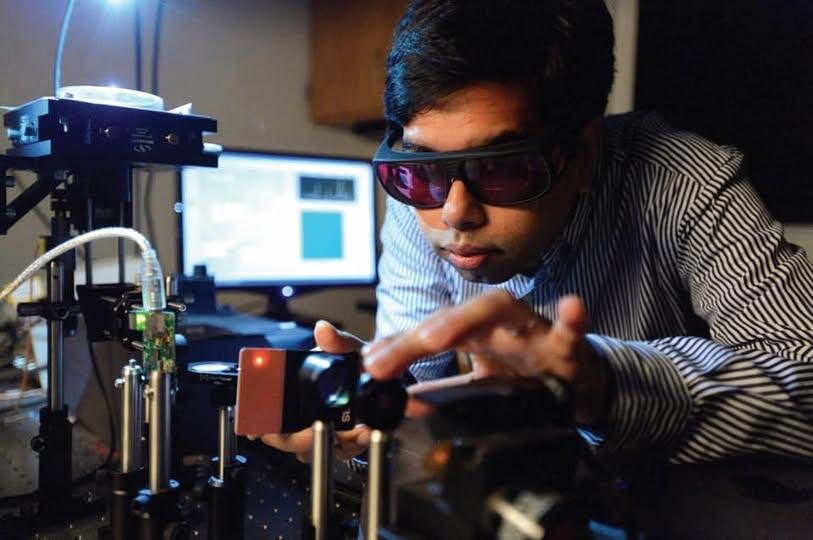
Os menores micro-robôs eletra´nicos de autopropulsão desenvolvidos pelos
pesquisadores manobram em laquido sobre uma moeda de 1 centavo de euro.
Crédito: TU Chemnitz.
"Comea§amos a explorar a ideia de criar um minaºsculo sistema microrroba³tico que éautopropulsado por um poderoso motor a jato e tem componentes microeletra´nicos a bordo háquase dez anos", disse Schmidt ao TechXplore. "Nossa idanãia inicial era construir um microssistema inteligente de autopropulsão que pudesse interagir com células biológicas únicas, de tamanho semelhante ao pra³prio microssistema. Esse sistema deve ser capaz de se movimentar, sentir seu ambiente, transportar carga, fornecer drogas e transportar micro-cirurgias. "
Desde que Schmidt e seus colegas introduziram seu conceito para um sistema microrroba³tico, sua equipe e vários outros em todo o mundo tentaram criar tecnologias semelhantes, principalmente in vitro (isto anã, usando placas de Petri). Implementar tais sistemas dentro do corpo humano , no entanto, provou ser muito mais desafiador. De fato, para concluir tarefas dentro do corpo, o sistema precisaria ser controlado externamente e as informações coletadas (por exemplo, dados de diagnóstico) devem ser facilmente transmitidas ao mundo externo (por exemplo, a médicos ou profissionais de saúde).
"Para que um sistema microrroba³tico funcione no corpo humano, ele deve conter energia elanãtrica , sensores, atuadores, antenas e circuitos microeletra´nicos", explicou Schmidt. "O principal objetivo do nosso trabalho recente foi dar um grande passo em direção a esse objetivo final (e reconhecidamente muito ambicioso); ainda de maneira simplificada, éclaro".
Schmidt e seus colegas fabricaram seu microssistema flexavel integrando componentes micro e nano eletra´nicos nasuperfÍcie de um chip, de maneira semelhante a maneira como a tecnologia de silacio éusada para criar chips de computador. Uma diferença importante entre o sistema e os chips de computador comuns, no entanto, éque o design do primeiro inclui motores a jato criados usando uma abordagem pioneira háproximadamente vinte anos, que normalmente não éusada no desenvolvimento de microeletra´nica convencional.
"O truque consiste em colocar materiais finos altamente tensos no chip, que se encaixam nas estruturas de microtubos de rolos suiços, quando eles são delaminados dasuperfÍcie do chip", disse Schmidt. "Este procedimento pode ser bem controlado, para que os microtubos enrolados sejam firmemente conectados em dois lados opostos ao sistema microrroba³tico. Se esses microtubos são revestidos com platina no interior, as bolhas de oxigaªnio são geradas por uma reação catalatica, uma vez que a platina entra tocar com uma solução aquosa contendo um pouco de pera³xido de hidroganãnio (H 2 O 2 )."

Dr. Oliver G. Schmidt enquanto conduz sua pesquisa. Crédito: Jacob Ma¼ller.
Como resultado da estratanãgia de design não convencional usado por Schmidt e seus colegas, quando o sistema microrobotic écolocada numa solução aquosa contendo pera³xido de hidroganãnio (H 2 O 2 ) a solução entra suas duas microtubos, a geração de bolhas de oxiganãnio. Essas bolhas são então empurradas para fora das extremidades dos microtubos, acelerando o sistema por um mecanismo conhecido como propulsão a jato.
"Esse princapio de propulsão a jato foi pioneiro em nosso grupo há12 anos", afirmou Schmidt. No entanto, um motor de jato duplo, como em nosso trabalho atual, nunca foi construado antes ".
A reação catalatica no centro da estratanãgia de propulsão a jato dos pesquisadores pode ser controlada alterando a temperatura dos motores a jato. Uma temperatura alta resulta em mais bolhas e um impulso mais forte; uma temperatura baixa em menos bolhas e um impulso mais fraco.
Schmidt e seus colegas controlam a temperatura de um dos dois motores a jato aplicando uma corrente que passa atravanãs de um elemento resistivo, que éconectado ao motor. Asmudanças de temperatura aumentam a quantidade de bolhas geradas e o impulso subsequente em um dos motores a jato, o que, por sua vez, permite que o sistema faz curvas a direita ou a esquerda.
"Vocaª pode se perguntar como fornecemos a corrente que aquece o elemento resistivo", disse Schmidt. "Para esse propa³sito, integramos uma minaºscula antena no microssistema que pode ser alimentada por energia sem fio do lado de fora (semelhante ao carregamento indutivo sem fio do seu telefone celular). Portanto, a energia elanãtrica éincorporada e pode ser usada, o que étotalmente novo para um microbot autopropulsado tão pequeno ".
O minaºsculo roba´ desenvolvido por Schmidt e seus colegas também tem um pequeno braa§o, o que lhe permite agarrar e liberar pequenos objetos ao seu redor. Quando a temperatura do sistema muda, o pequeno braa§o executa ações diferentes, curvando-se para pegar objetos (por exemplo, micropalulas) ou curvando-se para libera¡-los.
"Este braa§o roba³tico integrado também éum recurso totalmente novo para microssistemas de autopropulsão", afirmou Schmidt. "Finalmente, o microrobot pode ter um pequeno LED infravermelho a bordo, que pode ser ligado pela energia transferida sem fio. Esse LED pode ser útil para rastrear o microrobot dentro do corpo. Ligar e desligar pequenos LEDS em um microrobot ma³vel nunca foi mostrado antes. "
O minaºsculo sistema roba³tico desenvolvido por Schmidt e sua equipe éfeito de um material altamente flexavel. Isso significa que ele pode ser dobrado ou deformado sem quebrar, portanto pode atépassar atravanãs de pequenos capilares ou outros pequenos canais do corpo humano e continuar funcionando normalmente.
No futuro, esse novo sistema podera¡ ter várias aplicações valiosas. Por exemplo, ele pode concluir tarefas dentro do corpo humano que exigem um altonívelde precisão, incluindo procedimentos ciraºrgicos ou de diagnóstico.
"Demonstramos que a energia elanãtrica pode ser transferida sem fio para sistemas microrrobóticos ultra pequenos e que essa energia pode ser usada para realizar tarefas aºteis: dirigir o microboba´ remotamente ou ligar e desligar um LED infravermelho", disse Schmidt. "O pra³ximo passo seráexecutar o sistema em fluidos biola³gicos, como o sangue. Para esse fim, os motores precisam ser construados de uma maneira ligeiramente diferente".